Know Thyself: Transferable Visual Control Policies
Through Robot-Awareness
Through Robot-Awareness
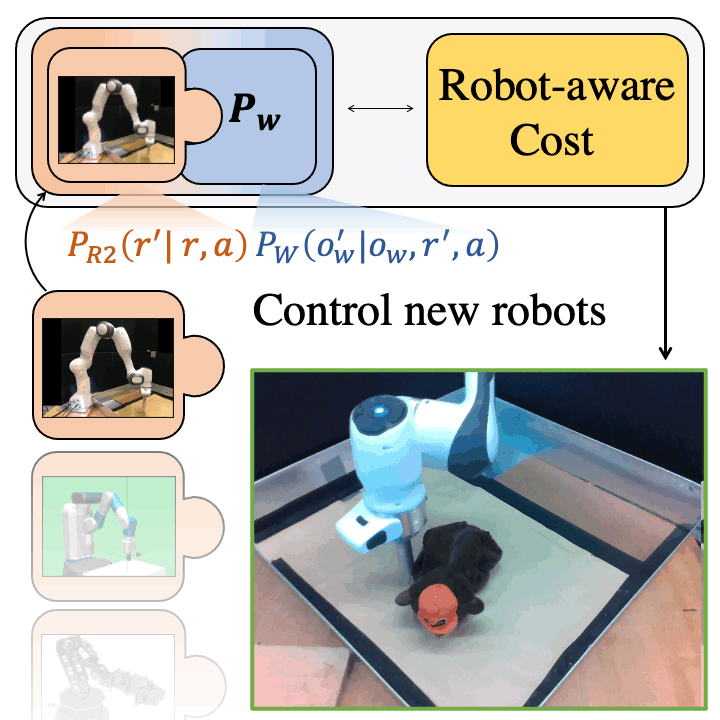
We address the problem of transferring a policy trained on one robot to another robot. Our method, Robot-Aware Control (RAC) achieves zero-shot transfer of visuomotor skills to unseen robots.